No products in the cart.
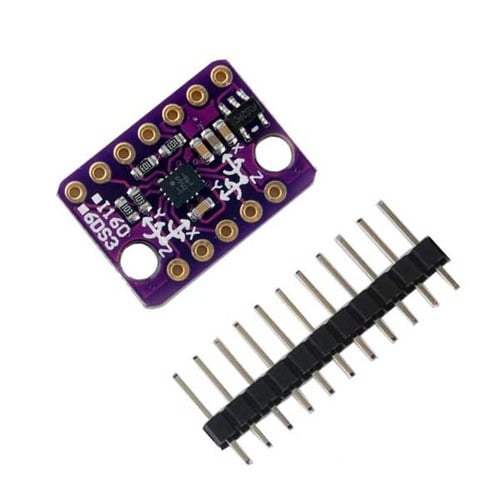

BMI160 Accelerometer Gyroscope Acceleration Gravity Sensor 6 DOF IMU
In Stock
EGP200.00
In Stock
Add to WishlistRemove from Wishlist
CompareAdd to Wishlist
Description
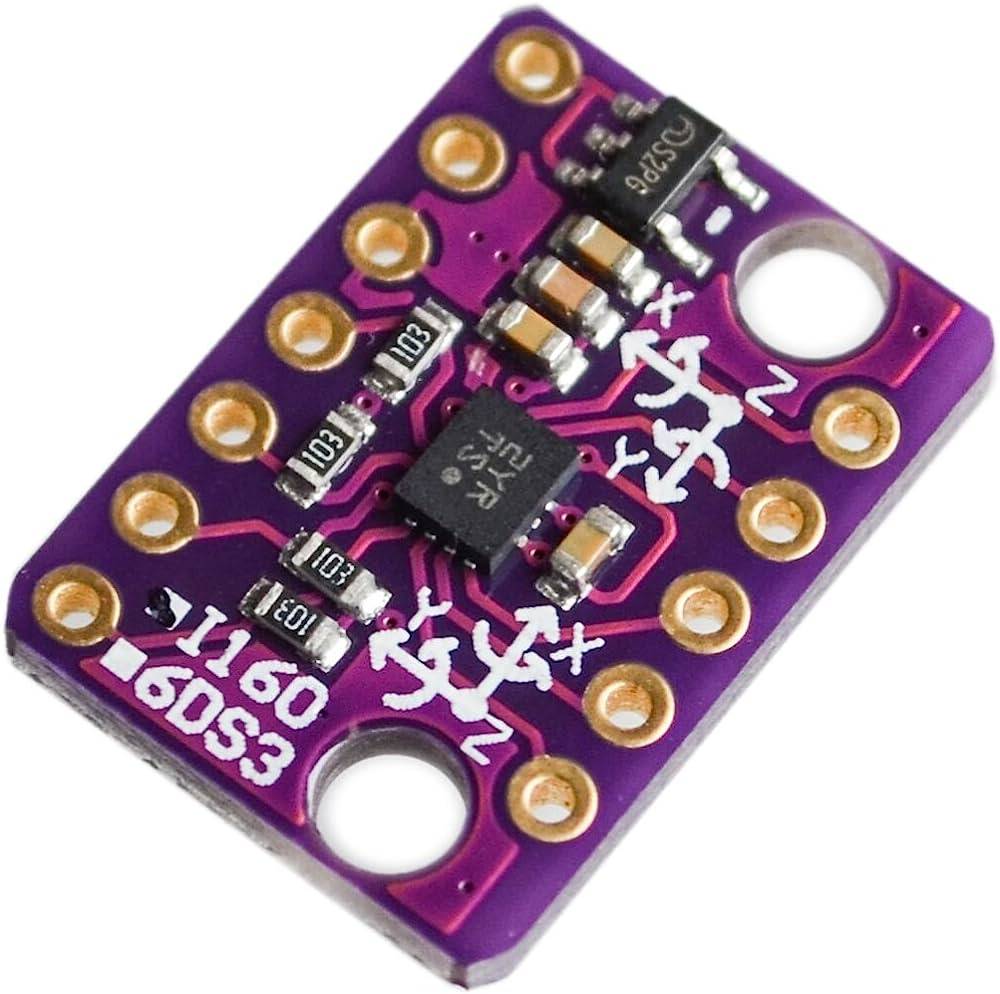
6 Axis Gyro Sensor Module Uses Bosch’s BMI1600 sensor. It has a 3-axis accelerometer and a 3-axis gyroscope. Ideal for IoT projects with ultra low power consumption. It can be directly connected to development boards such as Arduino with its 3.3V interface.
6 DOF BMI160 Gyro Sensor Module Technical Specifications
- Working voltage: 3.2V ~ 6V
- Current consumption:<1mA
- Interface mode: 2.54 pitch pin header
- Acceleration optional ruler: ± 2g / ± 4g / ± 8g / ± 16g
- Gyro optional scale: ± 125 ° / s, ± 250 ° / s, ± 500 ° / s, ± 1000 ° / s, ± 2000 ° / s
- Accelerometer zero drift: ± 40mg
- Land zero drift: ± / s
- Programmable frequency: 25 / 32Hz ~ 1600Hz
- 6D detection and positioning
- 16-bit data output
- Impact resistance: 10,000 gx 200μs
- 2 independently programmable cutting generators
- Internal 1024 bytes FIFO
- Working temperature: -40 ° C ~ + 85 ° C
The bmi160 sensor platform allows you to use your BMI160 Accelerometer/Gyroscope (datasheet, SparkFun) sensors with ESPHome.
The I²C Bus is required to be set up in your configuration for this sensor to work.
This component only does some basic filtering and no calibration. Due to the complexity of this sensor and the amount of possible configuration options, you should probably create an external component by copying and modifying the existing code if you want a specific new feature. Supporting all possible use cases would be quite hard.

# Example configuration entry
sensor:
- platform: bmi160
address: 0x68
update_interval: 60s
acceleration_x:
name: "BMI160 Accel X"
acceleration_y:
name: "BMI160 Accel Y"
acceleration_z:
name: "BMI160 Accel z"
gyroscope_x:
name: "BMI160 Gyro X"
gyroscope_y:
name: "BMI160 Gyro Y"
gyroscope_z:
name: "BMI160 Gyro z"
temperature:
name: "BMI160 Temperature"
Configuration variables:
- address (Optional, int): Manually specify the I²C address of the sensor. Defaults to
0x68, may also be0x69. - acceleration_x (Optional): Use the X-Axis of the Accelerometer. All options from Sensor.
- acceleration_y (Optional): Use the Y-Axis of the Accelerometer. All options from Sensor.
- acceleration_z (Optional): Use the Z-Axis of the Accelerometer. All options from Sensor.
- gyroscope_x (Optional): Use the X-Axis of the Gyroscope. All options from Sensor.
- gyroscope_y (Optional): Use the Y-Axis of the Gyroscope. All options from Sensor.
- gyroscope_z (Optional): Use the Z-Axis of the Gyroscope. All options from Sensor.
- temperature (Optional): Use the internal temperature of the sensor. All options from Sensor.
- update_interval (Optional, Time): The interval to check the sensor. Defaults to
60s. - id (Optional, ID): Manually specify the ID used for code generation.
Related products





- Image
- SKU
- Rating
- Price
- Stock
- Availability
- Add to cart
- Description
- Content
- Weight
- Dimensions
- Additional information